







仿生七自由度雙臂,支持并行及異步作業(yè),可空中接力與換手,輕松應(yīng)對(duì)復(fù)雜工件和特定位姿操作。
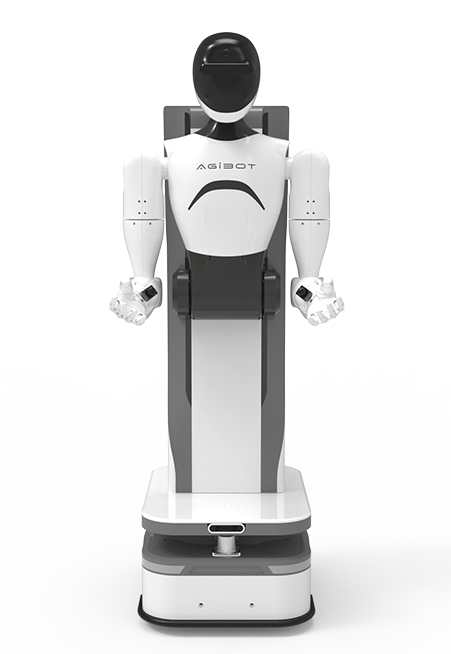
四輪四驅(qū),支持零回轉(zhuǎn)半徑與蟹行,腰部可升降與俯仰,22自由度全方位覆蓋人類作業(yè)空間。
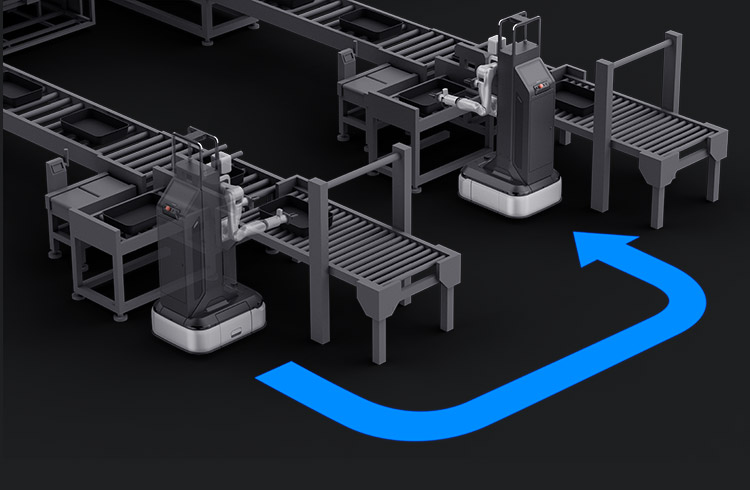
專為柔性智造場(chǎng)景打造,具備抓取、放置、搬運(yùn)、插接等多種能力,自研具身智能算法,并開(kāi)放接口、提供工具方便二次開(kāi)發(fā)。遠(yuǎn)征A2-W作業(yè)技能通過(guò)數(shù)據(jù)積累可不斷優(yōu)化,越用越智能,越用越高效。
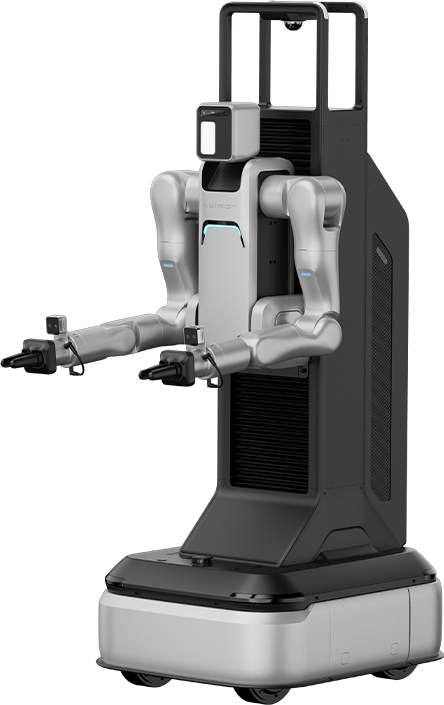
智元遠(yuǎn)征A2-W輪式通用機(jī)器人,專為柔性智造場(chǎng)景打造,具備抓取、放置、搬運(yùn)、插接等多種能力,自研具身智能算法,并開(kāi)放接口、提供工具方便二次開(kāi)發(fā)。遠(yuǎn)征A2-W作業(yè)技能通過(guò)數(shù)據(jù)積累可不斷優(yōu)化,越用越智能,越用越高效。遠(yuǎn)征A2-W還擁有仿生雙臂設(shè)計(jì)、高精度力控、多個(gè)深度與視覺(jué)傳感器及四輪四驅(qū)系統(tǒng),確保在復(fù)雜環(huán)境中穩(wěn)定、靈活、高效、安全的作業(yè);全身一體化設(shè)計(jì),實(shí)現(xiàn)開(kāi)箱即用的便捷部署;支持熱插拔換電,減少補(bǔ)能時(shí)間。遠(yuǎn)征A2-W可應(yīng)用于上下料、端子插接、物流轉(zhuǎn)運(yùn)等場(chǎng)景,是提升產(chǎn)線自動(dòng)化水平、實(shí)現(xiàn)柔性生產(chǎn)的理想選擇。
仿生七自由度雙臂,支持并行及異步作業(yè),可空中接力與換手,輕松應(yīng)對(duì)復(fù)雜工件和特定位姿操作。
四輪四驅(qū),支持零回轉(zhuǎn)半徑與蟹行,腰部可升降與俯仰,22自由度全方位覆蓋人類作業(yè)空間。
底盤(pán)、手臂、感知系統(tǒng)一體式設(shè)計(jì),支持天級(jí)安裝調(diào)試部署時(shí)間。
基于UniGrasp、Uni6DPose、UniPlug等具身原子能力及275T算力,能實(shí)現(xiàn)毫秒級(jí)實(shí)時(shí)對(duì)象識(shí)別、位姿估計(jì)及操作決策,動(dòng)態(tài)適配柔性作業(yè)環(huán)境。
通過(guò)3D模型合成訓(xùn)練+強(qiáng)化學(xué)習(xí),操作對(duì)象更換最快可縮短至小時(shí)級(jí)。
原子能力模塊化設(shè)計(jì),可OTA迭代升級(jí);作業(yè)技能庫(kù)可持續(xù)拓展,越用越豐富。
具身算法可通過(guò)數(shù)據(jù)采集及訓(xùn)練不斷優(yōu)化,越用越智能,越用越高效。
采訓(xùn)推一體化設(shè)計(jì),支持高效數(shù)據(jù)采集、仿真訓(xùn)練和推理部署。
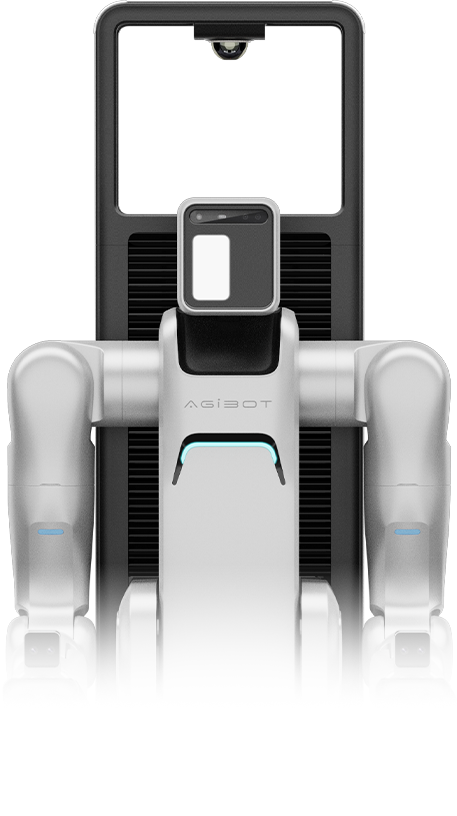
360°激光雷達(dá)+4顆AI視覺(jué)傳感器+2顆六維力覺(jué)傳感器等多傳感器融合感知,實(shí)現(xiàn)毫秒級(jí)感知與智能避障。
手臂碰撞檢測(cè)系統(tǒng)+360°環(huán)境實(shí)時(shí)感知+感知控制多路冗余設(shè)計(jì),確保人員與環(huán)境安全。
支持熱插拔換電,分鐘級(jí)補(bǔ)能時(shí)間,支持自主充電,減少人工干預(yù)。
內(nèi)置任務(wù)實(shí)時(shí)自診斷與自恢復(fù)機(jī)制,減少非計(jì)劃停機(jī)時(shí)間與維護(hù)投入。